
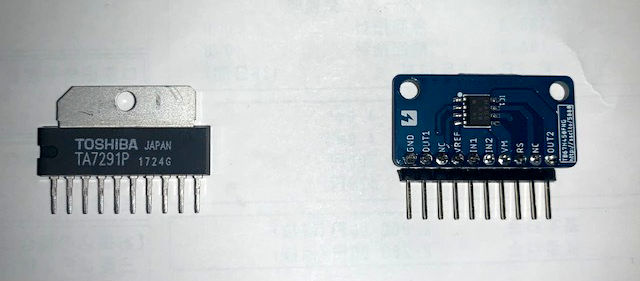
東芝デバイス&ストレージのブラシ付きモーター用ドライバICを搭載したTB67H450FNG搭載モータドライバ ピッチ変換基板が発売されました。モータードライバICと言えば同社のTA7291Pを使われている方も多いと思います。どう違うのかまとめました。
TA7291Pモータドライバ
TA7291Pの動作範囲は以下の通りです。
| 項目 | 記号 | 最小 | 標準 | 最大 | 最大 | 備考 |
|---|---|---|---|---|---|---|
| モータ動作電圧 | VM | 4.5 | ー | 20 | V | ー |
| モータ出力電流 | Iout | ー | 1.0 | 2.0 | A | ー |
| ロジック入力電圧 | VIN(H) | 3.5 | ー | 5.5 | V | ロジックのHレベル |
| VIN(L) | 0 | ー | 0.8 | V | ロジックのLレベル | |
| 出力側電源電圧 | VS | 0 | ー | 20 | V | VS≧Vref |
| Vref電圧入力範囲 | Vref | 0 | ー | 20 | V | 定電流制御時 |
そしてピン配置は以下の通りです。上の写真では左端が1番ピンです。
| 端子番号 | 端子名称 | 機能 |
|---|---|---|
| 1 | GND | GND端子 |
| 2 | OUT1 | モータ出力端子1 |
| 3 | NC | 未接続 |
| 4 | Vref | 制御電源端子 |
| 5 | IN1 | ロジック入力端子1 |
| 6 | IN2 | ロジック入力端子2 |
| 7 | VCC | ロジック側電源端子 |
| 8 | VS | 出力側電源端子 |
| 9 | NC | 未接続 |
| 10 | OUT2 | モータ出力端子2 |
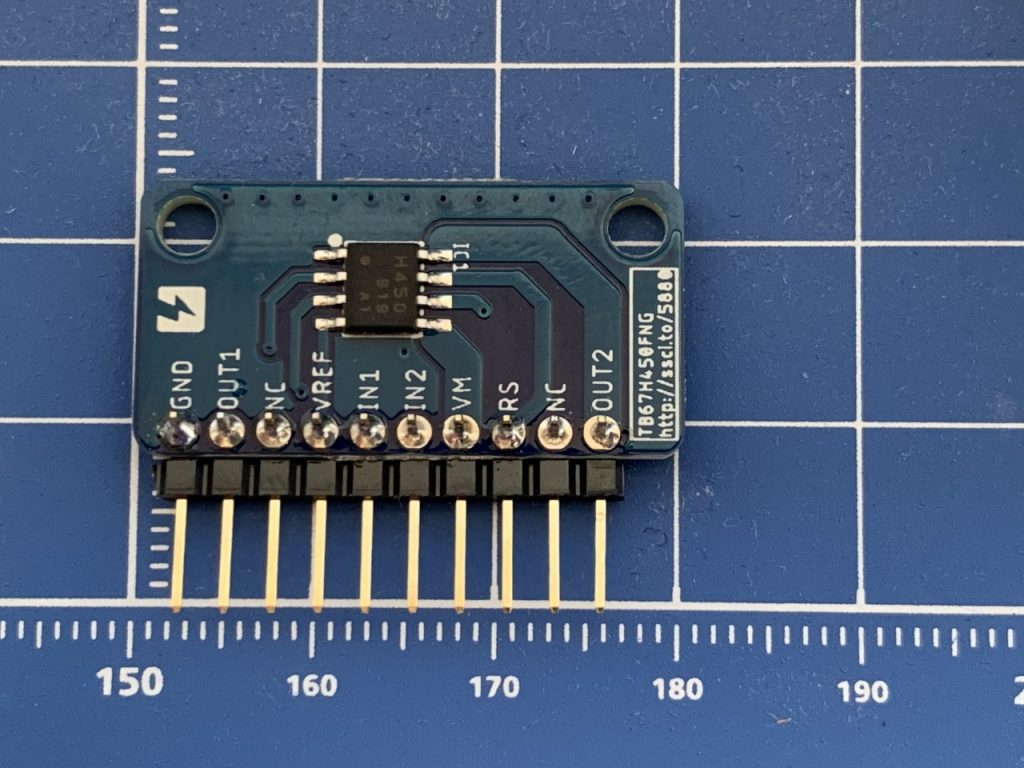
TB67H450FNG搭載モータドライバ ピッチ変換基板
動作範囲は以下の通りです。TA7291Pモータドライバと比べるとモータ動作電圧VMが20Vから40Vに変わっています。これにより、モータの出力電流も2Aから3Aに変わっています。
| 項目 | 記号 | 最小 | 標準 | 最大 | 単位 | 備考 |
|---|---|---|---|---|---|---|
| モータ動作電圧 | VM | 4.5 | 24 | 44 | V | ー |
| モータ出力電流 | Iout | ー | 1.5 | 3.0 | A | ー |
| ロジック入力電圧 | VIN(H) | 2.0 | ー | 5.5 | V | ロジックのHレベル |
| VIN(L) | 0 | ー | 0.8 | V | ロジックのLレベル | |
| Vref電圧入力範囲 | Vref | 0 | 2.0 | 4.0 | V | 定電流制御時 |
ピン配置は以下の通りです。
| 端子番号 | 端子名称 | 機能 |
|---|---|---|
| 1 | GND | GND端子 |
| 2 | OUT1 | モータ出力端子1 |
| 3 | NC | 未接続 |
| 4 | Vref | 制御電源端子 |
| 5 | IN1 | ロジック入力端子1 |
| 6 | IN2 | ロジック入力端子2 |
| 7 | VM | モータ電源 |
| 8 | RS | モータ出力電流検出用端子 |
| 9 | NC | 未接続 |
| 10 | OUT2 | モータ出力端子2 |
TA7291P、TB67H450FNGどちらも動作状態は同じです。
| IN1 | IN2 | OUT1 | OUT2 | モード |
|---|---|---|---|---|
| L | L | Hi-Z | Hi-Z | ストップ |
| H | L | H | L | 正転 |
| L | H | L | H | 逆転 |
| H | H | L | L | ブレーキ |
電流が流れる向きは正転の時 OUT1→OUT2、逆転の時 OUT2→OUT1 です。
2種類のモータドライバの違いについて
ピン配置について
ピン配置の表をそれぞれ見たときに、TA7291Pモータドライバはロジック用電源とモータ用の電源がわかれています。また、8番のVS端子がモータの電源端子で、制御電源端子Vref以上の電圧を入力します。
これに対し、TB67H450FNGモータドライバでは8番の端子のピンはRS端子という、モータドライバが出力する最大電流を制御するピンです。このピンは使用しない場合はGNDに接続します。ロジック用電源端子とモータ出力用電源端子のピンは1つのピンにまとめられているため、モータドライバ動作用の電源は7番のVCCピンを使用します。
このため、TA7291Pを使用していた回路ではTB67H450FNGをそのまま差し替えて使用することができません。下の表のようにTA7291Pで使用している8番端子のピンをGNDに接続し、7番ピンをモータの動作電圧に設定する必要があります。
| 端子番号 | TA7291P | TB67H450FNG |
|---|---|---|
| 7 | IC電源 | モータ電源 |
| 8 | モータ電源 | GND |
また、制御電源端子Vefの範囲が大きく異なります。TB67H450FNGのVrefの絶対最大定格は5.5Vとなっているため、その値よりも大きい値の制御電源をTA7291Pで使用していた場合は、制御電源を変更する必要があります。
| 端子番号 | TA7291P | TB67H450FNG |
|---|---|---|
| 4 | 0V~20V | 0V~4V |
モータ出力電流検出用端子について
8番端子のモータ出力電流検出用端子RSは、この端子と、GNDの間に抵抗を挿入することで、モータドライバから出力される電流を設定することができる端子になっています。
TB67H450FNGのデータシートには以下のように記載されています。
この IC では、PWM 定電流制御を行い、モーターの動作を行います。そのときの最高電流値 (設定電流値) については、 電流をセンスするためのセンス抵抗 (RRS) と、リファレンス電圧 (Vref) を設定することによって、決定することができま す。
定電流制御機能を無効にしたい場合は、RS 端子を GND に接続し、VREF 端子に 1~5V を入力してください。TB67H450FNGデータシート(日本語版)より
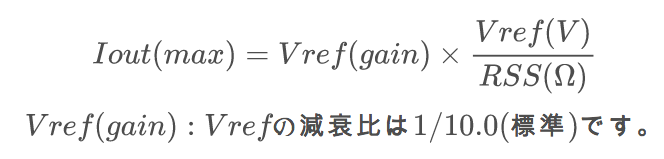
このとき必要となる抵抗の大きさは、データシートに記載されている下式を使用して計算することができます。
例として、ワイヤ付きホビーモーター及びArduino互換機であるMaker UNO Plusを使用します。

モーターの定電流出力値 (Peak 電流)を110mAとして設定したい場合には、Arduinoから入力するVrefピンの最大の電圧は5Vであるため、式を利用して計算を行うと、
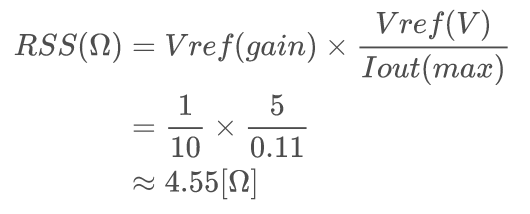
と計算することができます。この結果を反映させるためには、8番端子RSピンと、GND接続の間に4.55Ωの抵抗を使用します。手持ちの抵抗で一番小さいものが2.2Ωのものであったため、これを2つ使用して代用しました。
また、モータドライバを動作するための電池がなかったので、Arduino(互換機)の5V電源を使用しました。
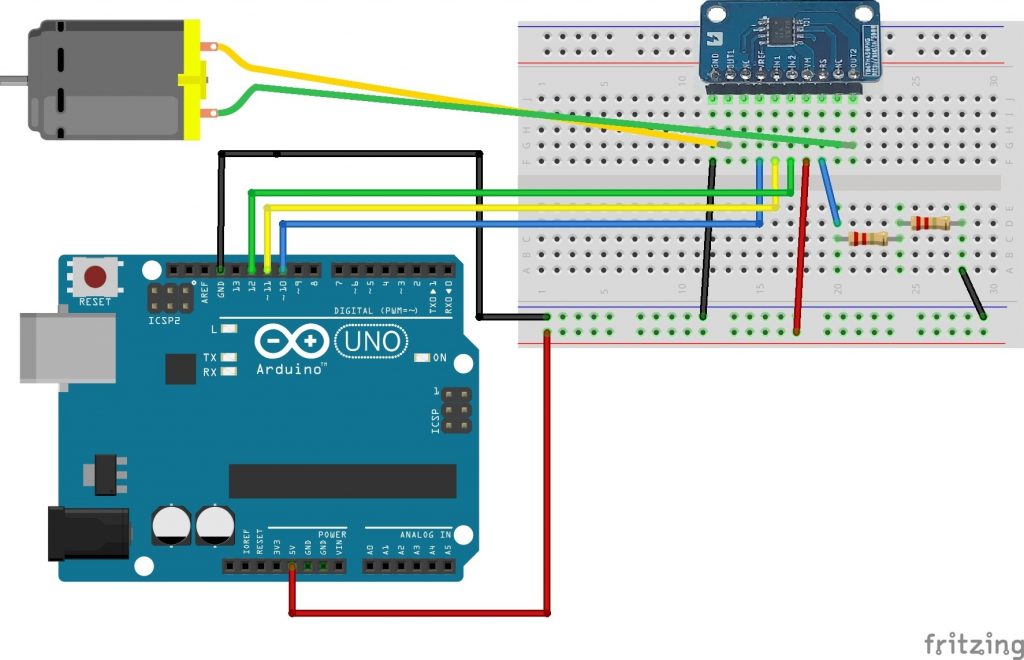
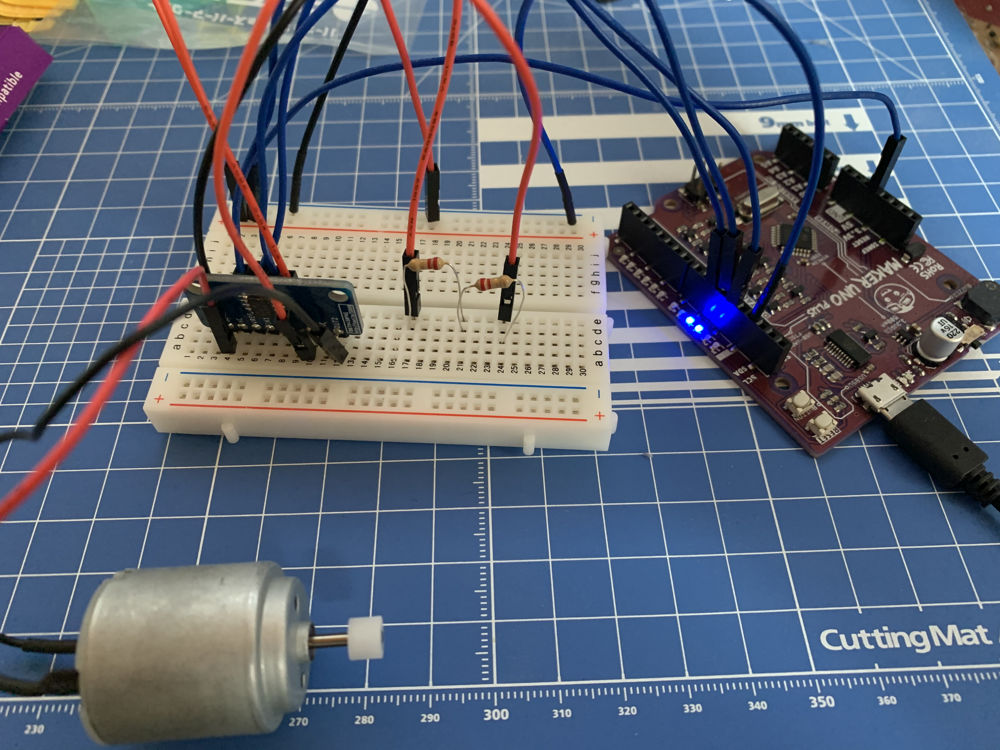
下の写真が回路の図面と実際に配線した写真です。
Arduino(互換機)から電源をとった場合に、定電流制御機能を無効にした時には、Arduino(互換機)の5Vから流れる電流が足りないためか電源が落ちることがありました。
このように計算を行うことで最高電流値 (設定電流値)を設定することができます。
データシート
- TA7291P
https://toshiba.semicon-storage.com/jp/semiconductor/product/motor-driver-ics/brushed-dc-motor-driver-ics/detail.TA7291P.html - TB67H450FNG
https://toshiba.semicon-storage.com/jp/semiconductor/product/motor-driver-ics/brushed-dc-motor-driver-ics/detail.TB67H450FNG.html